
 English Version.
English Version.
Catorce con noventa y cinco dólares es el precio en estos momentos de un circuito en iRacing. ¿Es un precio alto o razonable? Pues diría que, como todo, depende de cómo se analice. Lo que no presenta dudas es que es en circuitos donde más nos vamos a gastar en este simulador, porque si bien en coches puedes centrarte en algunas clases y no salirte de ellas durante un buen tiempo, la lista de circuitos de una serie va variando, por lo que afrontar una temporada con cierta regularidad pasa por tener una buena parte de ellos, más aún si corres en oval y road. El objetivo de este artículo no es sin embargo hablar de lo que cuesta correr en iRacing, lo que haremos es centrarnos en los sistemas Láser Escáner 3D para entender qué son y cómo se utilizan para crear los circuitos de simulación en los que corremos.
 Los aficionados al simracing y al automovilismo en general ya saben, o al menos habrán oído, que los circuitos de los simuladores de última generación son creados con tecnología Láser Escáner (en adelante, LE). En realidad no es que sean creados “con”, sino a partir de los puntos obtenidos con este tipo de equipos. Es decir, el LE se utiliza para realizar el levantamiento topográfico 3D del circuito.
Los aficionados al simracing y al automovilismo en general ya saben, o al menos habrán oído, que los circuitos de los simuladores de última generación son creados con tecnología Láser Escáner (en adelante, LE). En realidad no es que sean creados “con”, sino a partir de los puntos obtenidos con este tipo de equipos. Es decir, el LE se utiliza para realizar el levantamiento topográfico 3D del circuito.
Los ingenieros en topografía y cartografía llevan décadas midiendo circuitos, sólo que antes lo hacían con otros equipos topográficos, porque la necesidad de tener planos técnicos precisos de las pistas no es de ahora, ha sido y es una necesidad de los equipos profesionales de competición para estudiar al detalle las trazadas y mejorar los tiempos.
Antes que los Láser Escáner…
Antes que los actuales sistemas de simulación 3D, se utilizaban planos de los circuito en papel y/o sistemas informáticos 2D para analizar las trazadas. De hecho, sistemas similares al de raceoptimal se siguen utilizando hoy para realizar este tipo de estudios, pero obviamente los actuales sistemas son mucho más completos. Sin embargo, nada de esto tiene valor si no se parte de una adecuada representación geométrica del circuito.

Los LE no son más que una evolución en la técnica de medición. Antes los ingenieros en topografía utilizaban teodolitos y niveles, luego estaciones totales y seguido equipos GPS topográficos, y ahora la tendencia son los LE. Los métodos tradicionales eran muy invasivos e implicaban la paralización total o parcial de la actividad del circuito, pues era necesaria la presencia del equipo de topografía durante varios días o semanas, dependiendo del circuito y requerimientos del proyecto. Levantar todo un circuito de 3 Km podía llevarse varias semanas de trabajo a jornada completa. Pero era lo que había, y los equipos profesionales de carreras nutrían de datos sus estudios y sistemas de simulación con levantamiento topográficos de este tipo, porque para ellos sí era (y es) crítico tener datos fiables.
Este tipo de levantamientos topográficos, aunque extremadamente precisos, milimétricos, no dejaban de ser un modelo de la realidad discreto, en el sentido de no continuo. El ingeniero en topografía decidía qué puntos medir y cuáles para levantar los elementos del circuito. Cuando utilizas un equipo topográfico de este tipo para medir por ejemplo un muro, o la línea borde de pista, seleccionas los puntos necesarios para trazar su geometría, pero no más. No mides un punto cada centímetro, ni mil puntos para trazar un arco, discretizas, porque no es estrictamente necesario y porque de lo contrario no terminarías ni en diez años.
 Y precisamente esta es la razón principal por la que se han impuesto los sistemas LE: el tiempo de toma se reduce sustancialmente, por un lado, y se obtienen levantamientos prácticamente continuos, por otro. Además, antes los elementos y espacios entorno a la pista, las zonas de escapada, vallas, muros, etc., se “inventaban” y modelaban en función de datos cartográficos o de fotografías del entorno, mientras que ahora el LE también los mide, aportando en un mismo barrido todos los datos importantes para el levantamiento del circuito en su totalidad, no sólo de la pista en sí. Y esto también tiene su importancia, porque esos elementos periféricos funcionan en muchos casos como elementos de referencia visual para los pilotos. En la medida en la que también éstos elementos estén ubicados con rigor, estaremos aportando una experiencia más completa y fiel a la realidad.
Y precisamente esta es la razón principal por la que se han impuesto los sistemas LE: el tiempo de toma se reduce sustancialmente, por un lado, y se obtienen levantamientos prácticamente continuos, por otro. Además, antes los elementos y espacios entorno a la pista, las zonas de escapada, vallas, muros, etc., se “inventaban” y modelaban en función de datos cartográficos o de fotografías del entorno, mientras que ahora el LE también los mide, aportando en un mismo barrido todos los datos importantes para el levantamiento del circuito en su totalidad, no sólo de la pista en sí. Y esto también tiene su importancia, porque esos elementos periféricos funcionan en muchos casos como elementos de referencia visual para los pilotos. En la medida en la que también éstos elementos estén ubicados con rigor, estaremos aportando una experiencia más completa y fiel a la realidad.
No obstante, si nos dicen que un circuito está levantado con LE, no tenemos porqué deducir directamente que las precisiones topográficas absolutas obtenidas deban ser altísimas y mejores que las de los métodos “tradicionales”. Tendremos, eso sí, mas puntos, pero no necesariamente mejores. Algunos simuladores están vendiendo el trabajo con LE como un reclamo, y veremos que, en parte y en algunos casos, son anuncios muy sensacionalistas. Pero no porque los LE no sean dispositivos de altísimas prestaciones, que lo son, sino porque los resultados de un levantamiento topográfico con LE, las precisiones posicionales de los puntos obtenidos, dependen de varios factores, de distancia, metodológicos y de los sistemas complementarios empleados junto al LE, y no sólo del propio LE. Al final, como en todo, los resultados dependen de qué tecnología usemos, pero, sobre todo, de cómo la apliquemos. También entraremos a analizarlo más adelante.

La palabra láser es el acrónimo en inglés de luz por emisión inducida de radiación (Light Amplification by Stimulated Emission of Radiation). El primer láser operativo fue demostrado en mayo de 1960 por Theodore Maiman en los laboratorios Hughes Research Laboratories. Desde entonces se han desarrollado y perfeccionado, y dan servicio a multitud de ciencias y ámbitos profesionales. Uno de estos campos es, como hemos visto, el de la medición en Ingeniería Topográfica.
Las dos titulaciones universitarias que en España están especializadas en el uso de los LE como herramientas de medición son la de Ingeniero Técnico en Geomática y Topografía (http://www.coit-topografia.es/) y la titulación superior de ésta, la de Ingeniero Superior en Topografía, Geodesia y Cartografía (http://www.topografia.upm.es/portal/site/ETSITopografia). Por supuesto, no son los únicos profesionales que emplean estos equipos, pero sí son sin duda los más cualificados potencialmente por su formación curricular para hacerlo correctamente, controlando las metodología, garantizando las precisiones tipo requeridas en cada proyecto y combinando estas técnicas con sistemas de medición y posicionamiento complementarios para ajustar y georreferenciar el conjunto medido.
 En los vídeos que iRacing ha colgado en su Web para explicar cómo han utilizado esta tecnología para levantar los circuitos, aparece material típicamente topográfico. La propia metodología aplicada es topografía pura y dura: recorridos poligonales y técnicas de enlace que permiten mantener el control y solape geométrico necesarios para a) ir cubriendo con las sucesivas estaciones todo el circuito, y b) poder georreferenciar todas las tomas realizadas. El LE que se ve en esos vídeos de iRacing es de la marca Leica, multinacional fabricante de equipos topográficos a través de su grupo Leica Geosystem. También la marca Trimble cuenta con este tipo de equipos, por ejemplo su TrimbleTX8 Scanner, y también cabe nombrar la marca FARO. Hay otras casas, pero quizás estas tres sean las más importantes en este ámbito.
En los vídeos que iRacing ha colgado en su Web para explicar cómo han utilizado esta tecnología para levantar los circuitos, aparece material típicamente topográfico. La propia metodología aplicada es topografía pura y dura: recorridos poligonales y técnicas de enlace que permiten mantener el control y solape geométrico necesarios para a) ir cubriendo con las sucesivas estaciones todo el circuito, y b) poder georreferenciar todas las tomas realizadas. El LE que se ve en esos vídeos de iRacing es de la marca Leica, multinacional fabricante de equipos topográficos a través de su grupo Leica Geosystem. También la marca Trimble cuenta con este tipo de equipos, por ejemplo su TrimbleTX8 Scanner, y también cabe nombrar la marca FARO. Hay otras casas, pero quizás estas tres sean las más importantes en este ámbito.
Funcionamiento de un LE
Pero, ¿cómo opera un LE? El hardware interno del LE lo que hace, básicamente, es lanzar una onda, rayo láser, y medir el tiempo que ésta tarda en volver al equipo. Cuenta, entre otros, con sistemas óptico-electrónicos de emisión y recepción del rayo, de control de las posiciones angulares del equipo y de procesamiento de los datos registrados (enlazo al final varios vídeos que lo explican). Como el dispositivo conoce de un modo muy preciso las características de ese rayo, la velocidad a la que viaja por el aire, el tiempo que consume en hacerlo y también las condiciones ambientales, pues cuenta con sensores internos que miden esos valores, con todo ello calcula la distancia a la que está ese objeto u obstáculo que ha provocado el rebote de la onda.

Esto, unido a que el equipo controla en todo momento la geometría relativa de los rayos emitidos, ángulos verticales y horizontales de cada una de esas señales que salen y entran, permite que el sistema asigne coordenadas XYZ a los registros obtenidos, que son, en definitiva, puntos en el espacio 3D situados entorno al LE.
En realidad, el LE no lanza un pulso de onda, sino cientos de miles por segundo, los suficientes para obtener las resoluciones y promedios tipo requeridos. Se harán una idea de que el tema es mucho más complejo que todo esto, que hay escáneres de medida de tiempo y otros denominados de triangulación, en función de cómo miden las distancias, y que los primeros, a su vez, se agrupan en láseres por tiempo de vuelo o por comparación de fase, cada uno con sus ventajas e inconvenientes y, por tanto, destinados a diferentes objetivos y requerimientos. En definitiva, diferentes desarrollos dentro de la misma tecnología que agrupamos por simplificar como LE. Obviamente, en todo esto no entraremos porque es “harina de otro costal”.
Cabe indicar no obstante, que no todos los LE trabajan con las mismas resoluciones y calidades, ni tienen los mismos alcances en distancia. Es más, un mismo equipo LE permite seleccionar diferentes rangos de resolución y calidad, pues en unos casos necesitaremos unos resultados “muy finos” y en otros no. Resolución y Calidad son los dos parámetros más importantes en un LE: Resolución, es la distancia entre puntos, que depende a su vez de la distancia a la que se encuentran los diferentes objetos respecto a la posición del LE. Es decir, para una misma resolución de toma, los elementos más cercanos al LE quedarán representados por una nube de puntos más densa. La Calidad, es la cantidad de veces que el LE va a medir cada punto, pues no se realiza una única medición sino varias, con el objetivo de promediar y obtener el valor más probable de distancia para cada punto. A su vez, los LE también pueden ser clasificados por su alcance. Los hay de alcance corto, para medición de cuevas, instalaciones o edificios interiores, pensados para distancias máximas de 30-40 m, otros para distancias de alcance medio, hasta 120m y otros de largo alcance, normalmente sobre los 350 m. Existen de mayor alcance, para realizar levantamientos desde aeronaves, pero en estos no entraremos.
 La mayoría de LE de última generación son capaces de obtener hasta 1.000.000 ptos/seg. Sí, han leído bien, un millón de puntos por segundo. Y eso no es todo, porque consiguen obtener las coordenadas XYZ de cada punto con precisiones <1 cm. Además de las coordenadas XYZ, el LE registra la reflectancia de la superficie medida y asigna a cada punto su valor correspondiente, lo que permite interpretar las diferentes superficies y texturas tomadas. La nube de puntos obtenida, aun siendo un conjunto desestructurado, como es tan densa conforma una imagen que permite interpretar con cierta claridad la forma y textura de los objetos tomados. Por otro lado, algunos equipos LE llevan incorporada internamente una cámara fotográfica que permite asignar a cada punto un color en el sistema RGB. Esto mejora significativamente la capacidad de análisis de la nube de puntos, pues la nube a determinados zoom se nos muestra como una fotografía del espacio medido.
La mayoría de LE de última generación son capaces de obtener hasta 1.000.000 ptos/seg. Sí, han leído bien, un millón de puntos por segundo. Y eso no es todo, porque consiguen obtener las coordenadas XYZ de cada punto con precisiones <1 cm. Además de las coordenadas XYZ, el LE registra la reflectancia de la superficie medida y asigna a cada punto su valor correspondiente, lo que permite interpretar las diferentes superficies y texturas tomadas. La nube de puntos obtenida, aun siendo un conjunto desestructurado, como es tan densa conforma una imagen que permite interpretar con cierta claridad la forma y textura de los objetos tomados. Por otro lado, algunos equipos LE llevan incorporada internamente una cámara fotográfica que permite asignar a cada punto un color en el sistema RGB. Esto mejora significativamente la capacidad de análisis de la nube de puntos, pues la nube a determinados zoom se nos muestra como una fotografía del espacio medido.
Tras realizar el levantamiento de un circuito con un LE, lo que obtenemos es simplemente una nube de puntos que sirve para identificar en gabinete los elementos medidos. Sobre esa base de información, que todavía no es una superficie ni un elemento estructural propiamente dichos, sólo puntos dispuestos en el espacio, hay que empezar a trabajar para obtener finalmente un modelo 3D.
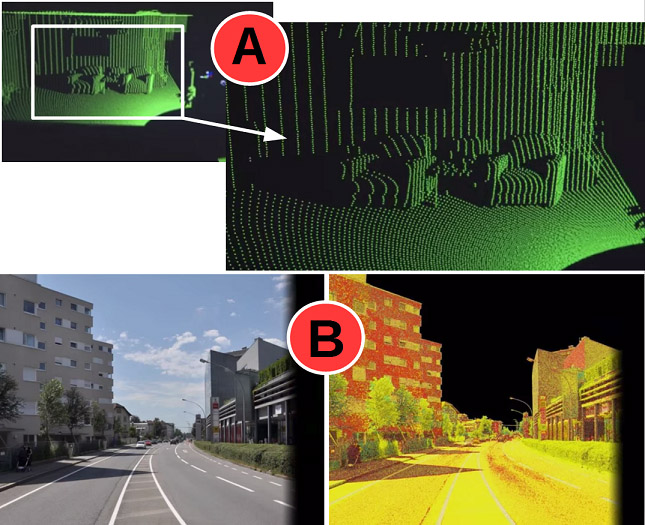
El detalle de las siguientes imágenes muestra en “A” una nube de puntos mono-color, con una baja resolución pues se aprecian con claridad los espacios entre barridos y las distancias entre punto y punto.
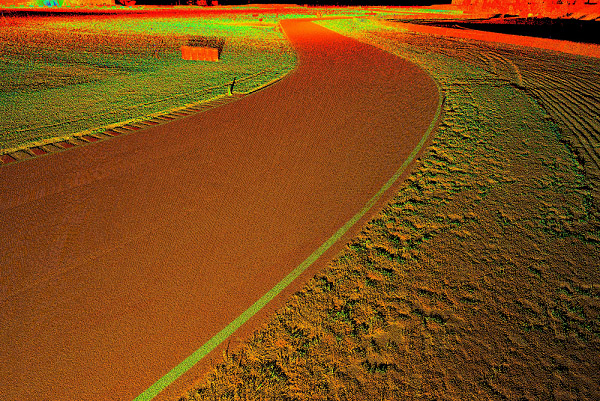
En “B” y en la imagen de arriba, la del tramo de pista, tenemos ejemplos de toma con LE donde los puntos contienen ese valor de reflectancia antes mencionado, que permite distinguir las diferentes texturas: no aporta una imagen fotográfica, pero sí permite identificar mejor los elementos que en “A”.
En la siguiente imagen, “C”, estamos en el caso en el que el LE incorpora una cámara fotográfica interna que asigna a cada punto el color RGB, de ahí que la imagen a cierto zoom parezca una foto sin serlo. Esto ayuda muchísimo en el proceso de delineación y modelado posterior.

A parte de que el LE pueda o no contar con esa cámara fotográfica interna, este tipo de trabajos se suele enriquecer con un estudio fotográfico complementario de todo el espacio medido. Las fotos tomadas son finalmente proyectadas sobre la estructura 3D, proceso que permite obtener un modelo foto realístico. Viene a ser algo así como si tirásemos una sábana extendida sobre una jaula: la sábana se moldea adaptándose a la forma de su estructura, pero lo que vemos es la imagen impresa en la sábana con forma de jaula, no la estructura de la jaula. El proceso conjunto es algo más complejo y requiere controlar ciertos aspectos posicionales y métricos, pero baste esta explicación simplificada para entender el concepto general: 1) Primero obtenemos la nube de puntos con el LE; 2) Ya en gabinete y apoyándonos en la nube de puntos, construimos las superficies, la jaula o “armazón” del modelo en 3D; y 3) Utilizando las imágenes fotográficas tomadas “empapelamos” todo el levantamiento, obteniendo finalmente el modelo 3D foto realístico del circuito medido.
LE Estáticos y Móviles. El método estático en los vídeos de Iracing
Hablemos ahora un poco de la metodología de campo que se emplea con los LE. Existen LE Estáticos y Móviles.
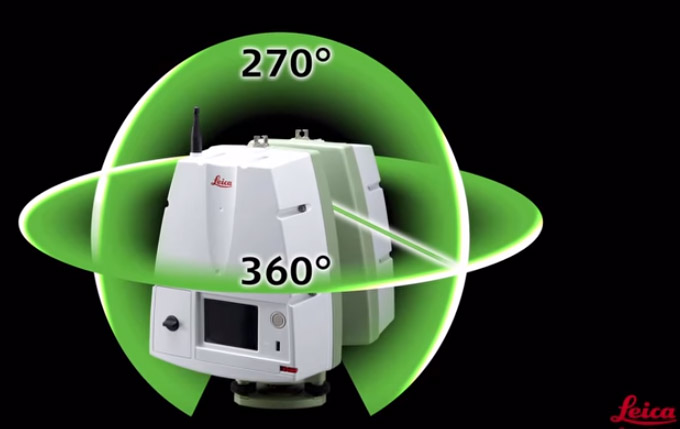 Los empleados por el equipo de iRacing en los vídeos enlazados son Estáticos. Ya en esos vídeos se explica, pero básicamente debemos entender que los LE Estáticos son estacionados sobre un trípode y desde cada una de esas bases realizan un barrido de todo lo que les rodea, cubriendo ese barrido los 360º de la horizontal y 270º-300º en la vertical superior. Así, a lo largo del circuito el LE va a ir siendo colocado en diferentes posiciones, pero permaneciendo estático en cada una de ellas hasta completar el barrido desde esa posición. La metodología aplicada normalmente (también por el equipo de iRacing) utiliza una serie de dianas esféricas que son colocadas estratégicamente a lo largo de las tomas, de modo que desde una estación y la siguiente consecutiva el LE ve y mide esas dianas. Éstas funcionan como puntos de control geométrico y de georreferenciación. Esto, explicado de una forma básica, es lo que permite que cada nube de puntos obtenida desde cada base o estación del LE pueda ser ordenada luego para conformar todo el bloque de puntos del circuito.
Los empleados por el equipo de iRacing en los vídeos enlazados son Estáticos. Ya en esos vídeos se explica, pero básicamente debemos entender que los LE Estáticos son estacionados sobre un trípode y desde cada una de esas bases realizan un barrido de todo lo que les rodea, cubriendo ese barrido los 360º de la horizontal y 270º-300º en la vertical superior. Así, a lo largo del circuito el LE va a ir siendo colocado en diferentes posiciones, pero permaneciendo estático en cada una de ellas hasta completar el barrido desde esa posición. La metodología aplicada normalmente (también por el equipo de iRacing) utiliza una serie de dianas esféricas que son colocadas estratégicamente a lo largo de las tomas, de modo que desde una estación y la siguiente consecutiva el LE ve y mide esas dianas. Éstas funcionan como puntos de control geométrico y de georreferenciación. Esto, explicado de una forma básica, es lo que permite que cada nube de puntos obtenida desde cada base o estación del LE pueda ser ordenada luego para conformar todo el bloque de puntos del circuito.
Para entenderlo mejor, añadir que cuando volcamos al ordenador las nubes de puntos obtenidas desde cada escaneo, cada una de ellas está inicialmente en una posición arbitraria, desordenadas las unas respecto a las otras, y que se utilizan esos puntos comunes, o dianas, para realizar el alineamiento de todas ellas hasta dejarlas dispuesta en su verdadera posición espacial. Ese alineamiento es en 3D. Esto se hace ya en gabinete, con el software específico. Hay también aquí diferentes métodos. Algunos software más avanzados no requieren del uso de las dianas, sino que analizan la información y posición relativa de los puntos para detectar “formas comunes” y realizar el encaje, pues cuentan con brújulas y GPS que permiten que las tomas no sean “tan arbitrarias”, sino que guarden cierta orientación, no precisa, pero sí suficiente como para que el software pueda realizar el ajuste fino de forma semiautomática. Pero en circuitos, al ser espacios tan abiertos, lo habitual es usar dianas. Si todo el proceso no se realiza con el rigor y control geométrico posicional necesarios en un levantamiento longitudinal de este tipo, normalmente de varios Km de longitud y con desniveles importantes en muchos casos, por mucha precisión relativa que tengamos con el LE, el levantamiento topográfico puede resultar poco riguroso, requiriendo realizar apaños o reajustes manuales que darán como resultado un trabajo, quizás muy “impresionante”, pero poco fiel a la realidad.
La siguiente imagen de iRacing muestra un circuito completo con todas las nubes de puntos de cada escaneo ya georreferenciadas. El detalle aumentado sirve para explicar qué son esos círculos negros. Son las diferentes estaciones donde ha sido colocado el equipo. Recordemos que el LE barre en la vertical sólo 270º-300º, dependiendo del modelo, dejando una “laguna” inferior sin tomar generada por el propio cuerpo del aparato y su apoyo. También se aprecia cómo alrededor de esos “huecos” existe mayor brillo o luminosidad aparente. En realidad lo que ocurre es que esas zonas cercanas presentan mayor densidad de puntos, como ya explicamos. En cambio, a medida que nos alejamos del LE, los elementos quedan representados con menor resolución. Así es como iRacing ha ido barriendo los circuitos, con estaciones estáticas colocadas estratégicamente para ir cubriendo todo el espacio a medir.

Para levantar por este método un circuito de 2 Km es necesario estacionar el LE en aprox. 35 bases, tomando en cada estación unos 15-30 millones de puntos, lo que hace un total de entre 600 y 1000 millones de puntos, cada punto con sus coordenadas XYZ, reflectancia y/o tono RGB, generando una nube de puntos en el espacio que, por su elevada resolución y calidad, conforma en sí misma un modelo gráfico 3D perfectamente medible e interpretable.
iRacing ha utilizado a nuestro juicio un conjunto de trabajo excelente, en el sentido de óptimo. Hardware, software, metodología y costes equilibrados para este tipo de proyectos, garantizando con ese conjunto una altísima calidad topográfica de la nube de puntos. Ha utilizado un método estático “tradicional” con dianas, más lento en campo, pero que permite garantizar unas resoluciones constantes y una nube de puntos con precisiones geométricamente muy controladas.
LE Móviles
Hemos leído y oído últimamente que otros simuladores anuncian que algunos de sus circuitos también han sido o están siendo levantados con sistemas LE. El primer problema es que cuando buscamos datos de esos trabajos en sus web o fuera de ellas, no encontramos casi nada. No explican ni los procedimientos, ni los equipos utilizado, etc. Se limitan a indicar que han usado LE como si eso en sí mismo fuese una garantía. Y aquí hablaré de los sistemas LE Móviles, pues lo que sí hemos podido encontrar acompañando a algunos de esos anuncios son fotos en las que se aprecian vehículos que portan este tipo de sistemas. Veamos algunas de estas fotos:


En estas dos imágenes, se aprecia un sistema LE Móvil sobre el vehículo. Por un lado, creemos que las cámaras que llevan son de vídeo, no cámaras fotográficas, por otro una antena GPS topográfica y por último, en la parte trasera, aunque cuesta identificarlo en estas tomas, el dispositivo LE propiamente dicho. El aspecto del conjunto, que sólo incorpore un LE, la disposición de las cámaras de vídeo y el hecho de que, en apariencia, no cuente con un segundo GPS para controlar mejor los recorridos, así como la carencia (también aparentemente) de un odómetro, básico en estos sistemas para registrar la distancia exacta recorrida, hacen pensar que se trata de un sistema LE Móvil de medio bajo coste, más rápido que los sistemas estáticos, obviamente, pero que no puede alcanzar ni garantizar las precisiones posicionales y topográficas de aquellos.
Escaneo Láser de Nürburgring
 Lo mismo sucede con las siguientes imágenes. Por lo que sabemos, es el sistema utilizado para escanear el circuito de Nürburgring Nordschleife. En ellas apreciamos un sistema más potente, ya con dos LE en la parte posterior y colocados en “V”, pero detectamos por contra que su disposición es horizontal, estos es, el eje de giro del sistema óptico del LE es horizontal, paralelo al suelo, por lo que los barridos no garantizan la toma de elementos verticales con precisión. Esta disposición ha dejado de usarse en los sistemas más punteros, que presentan normalmente la misma disposición en “V”, pero con los dos láser dispuestos con una cierta inclinación respecto a la horizontal. El objetivo de esta inclinación es que el plano de “loncheado” que va formando el Láser vaya ”cortando” diagonalmente, no verticalmente, los elementos que encuentra a su paso. Si ese corte es vertical, no es posible garantizar que la representación de los inicios y finales de los elementos o paramentos verticales queden correctamente situados y definidos. Por otro lado, también en estas imágenes se aprecian de nuevo cámaras de vídeo y no un sistema fotográfico, que es lo que portan los sistemas más potentes (y costosos).
Lo mismo sucede con las siguientes imágenes. Por lo que sabemos, es el sistema utilizado para escanear el circuito de Nürburgring Nordschleife. En ellas apreciamos un sistema más potente, ya con dos LE en la parte posterior y colocados en “V”, pero detectamos por contra que su disposición es horizontal, estos es, el eje de giro del sistema óptico del LE es horizontal, paralelo al suelo, por lo que los barridos no garantizan la toma de elementos verticales con precisión. Esta disposición ha dejado de usarse en los sistemas más punteros, que presentan normalmente la misma disposición en “V”, pero con los dos láser dispuestos con una cierta inclinación respecto a la horizontal. El objetivo de esta inclinación es que el plano de “loncheado” que va formando el Láser vaya ”cortando” diagonalmente, no verticalmente, los elementos que encuentra a su paso. Si ese corte es vertical, no es posible garantizar que la representación de los inicios y finales de los elementos o paramentos verticales queden correctamente situados y definidos. Por otro lado, también en estas imágenes se aprecian de nuevo cámaras de vídeo y no un sistema fotográfico, que es lo que portan los sistemas más potentes (y costosos).

A pesar de que este levantamiento de Nürburgring Nordschleife es un proyecto relativamente reciente, creemos que se trata de un sistema LE Móvil no puntero, y que, igual que el anterior, no alcanza las garantías y precisiones métricas absolutas del sistema estático empleado por iRacing.
Hemos leído en algún foro, que el equipo de iRacing utilizó uno de estos sistemas Móviles para levantar el circuito de Ímola, pero no tenemos más datos y desconocemos si esto es así, qué equipos exactamente utilizaron y qué resultados obtuvieron respecto al sistema estático.
El caso del levantamiento del circuito de Nürburgring Nordschleife es un caso atípico. Por lo que hemos podido averiguar, aquí no ha sido la empresa del simulador la que ha realizado el levantamiento, sino que ha sido el propio circuito el que ha promovido dicho levantamiento para luego ofrecerlo a los simuladores que quieran incorporarlo. Es una apuesta muy inteligente, porque este circuito realiza una inversión que sin duda contribuirá a aumentar su presencia en el mercado de circuitos y que otros pilotos o simracer se interesen por conocerlo y visitarlo para correr en él. Deducimos que no han optado por el sistema estático por su mayor lentitud y ocupación de la pista, máxime siendo éste un circuito tan largo (21 Km) y tan complicado topográficamente hablando. También echamos en falta no haber visto en una inversión de este calado a las marcas punteras en Mapping Mobile Systems, pero como no tenemos más datos, tampoco podemos comentar nada más.
Dicho todo esto, podría traslucirse que los sistemas LE Móviles son menos garantistas que los Estáticos, pero no es exactamente eso lo que intentamos destacar. Como ya adelantamos hablando de los sistemas estáticos, el control posicional del LE debe estar garantizado de forma precisa a lo largo del recorrido, y este aspecto es aún más delicado y complejo de controlar en los sistemas móviles, razón por la que si no van equipados con equipos complementarios de máxima calidad, sus resultados desde un punto de vista topográfico pueden ser cuestionables, válidos quizás para un juego de simulación, pero no para un simulador cuya vocación sea la de servir también como sistema de entrenamiento profesional.

Existes sistemas mixtos, donde el LE opera como un estático, pero va transportado sobre un vehículo que va haciendo paradas cada cierta distancia. Estos sistemas introducen aún más incertidumbres que los anteriores, pero también han sido utilizados por algunos juegos de carreras. No pondremos imágenes ni damos más datos, porque la información al respecto está muy dispersa y porque pondrían en un compromiso a más de uno, pero en muchas de esas fuentes se habla con demasiada ligereza de precisiones milimétricas.
Otros LE Móviles
 Existen además sistemas LE Móviles que sí aportan garantías topográficas de altas prestaciones. Por ejemplo el sistema MX2 de Trimble, que porta un equipamiento completo: sistemas IMU y DMI, dos sistemas GNSS y sistema fotográfico central, que permiten en conjunto controlar y sincronizar todos los registros, dando garantías métricas y posicionales en un sistema móvil. Trimble no es la única que porta estos equipos, pero sí una de las marcas punteras en esta línea de productos, y su MX2 es un claro ejemplo de sistema LE Móvil con garantías. También Leica tiene un equipo para este rango de servicios, el Pegasus.
Existen además sistemas LE Móviles que sí aportan garantías topográficas de altas prestaciones. Por ejemplo el sistema MX2 de Trimble, que porta un equipamiento completo: sistemas IMU y DMI, dos sistemas GNSS y sistema fotográfico central, que permiten en conjunto controlar y sincronizar todos los registros, dando garantías métricas y posicionales en un sistema móvil. Trimble no es la única que porta estos equipos, pero sí una de las marcas punteras en esta línea de productos, y su MX2 es un claro ejemplo de sistema LE Móvil con garantías. También Leica tiene un equipo para este rango de servicios, el Pegasus.


Hay que entender que una cosa es realizar el levantamiento topográfico del circuito y otra completar el modelo digital del mismo y su integración en un simulador. La renderización de sus superficies, su aspecto, el modelado de los edificios y la vegetación, los efectos de luz, las diferentes adherencias de la pista, sus físicas, la climatología, los algoritmos que calculan las respuestas e interacciones del coche con el circuito, etc., etc., etc. Desde esa escala, la toma de puntos con LE no ocupa más que la fase inicial de un proyecto que es mucho más complejo, en el que intervienen otras muchas disciplinas, por lo que es lógico entender que los responsables de estos trabajos adecuen los métodos y sistemas a emplear a sus requerimientos y posibilidades, a sus recursos humanos y económicos. Aquí la vocación del simulador es clave: no es lo mismo que esté pensado para una consola, como un juego, o que que aspire a ser un sistema de entrenamiento profesional, orientado a la competición tradicional u online. Pero también juegan un papel importante las condiciones impuestas por los circuitos en cada caso, pues parar la actividad normal de un circuito como el de Nürburgring Nordschleife es algo que el circuito quizás no se puede permitir por las pérdidas económicas que ello le supone.

La adquisición de un equipo LE Estático puede costar de media unos 45.000€, mientras que un sistema Móvil completo ronda los 250.000€, pero ambos pueden dar resultados excelentes o mediocres desde un punto de vista topográfico dependiendo de quién y cómo los utilice. Obviamente, el coste de subcontratar un sistema u otro también es distinto, y también depende de lo que se quiera obtener.
 Lo que me gustaría que quedase claro con todo esto es que un sistema LE Móvil, con “cuatro cámaras en el techo y una antena GPS” por sí solo no da las precisiones milimétricas que algunos anuncian, por más que el LE en sí mismo y de forma puntual sí pueda darlas, pues un sistema móvil requiere de otros elementos complementarios que son a su vez imprescindibles para garantizar ese rigor topográfico. Los gestores de estos proyectos deberían dar a la comunidad simracing más datos, no digo todos, pero sí más datos, de lo que anuncian, si quieren que valoremos en su justa medida lo qué ofrecen.
Lo que me gustaría que quedase claro con todo esto es que un sistema LE Móvil, con “cuatro cámaras en el techo y una antena GPS” por sí solo no da las precisiones milimétricas que algunos anuncian, por más que el LE en sí mismo y de forma puntual sí pueda darlas, pues un sistema móvil requiere de otros elementos complementarios que son a su vez imprescindibles para garantizar ese rigor topográfico. Los gestores de estos proyectos deberían dar a la comunidad simracing más datos, no digo todos, pero sí más datos, de lo que anuncian, si quieren que valoremos en su justa medida lo qué ofrecen.

Conclusiones
¿Qué es a nuestro juicio lo sustancial y más interesante de todo esto?, que se ponga en valor conseguir que la experiencia virtual se asemeje todo lo posible a la experiencia real, pero no sólo por una cuestión estética, sino formal, métrica, aspecto crítico cuando los gestores del simulador lo que buscan es ser, además de una plataforma de competición online, una herramienta de entrenamiento para los pilotos profesionales, pues para éstos últimos sí es crítico que el circuito virtual en el que entrenan ciertas facetas de su preparación, sea lo más fiel posible a la realidad a la que luego se van a enfrentar.
 El levantamiento topográfico 3D de un circuito se puede afrontar hoy en día de tres maneras: 1, por métodos topográficos “clásicos”; 2, con LE estáticos; 3, con LE Móviles. Estos métodos se pueden en la práctica complementar, que de hecho es lo que ocurre normalmente, pero éstas serían las tres formas independientes, para entendernos, que podríamos plantear si buscamos un levantamiento topográfico correcto de un circuito. La primera fórmula, la “clásica”, es altamente precisa, pero los datos son discretos (no continuos) y operativamente es más lenta y trabajosa. El segundo método sería con LE, con precisiones y control geométrico muy buenos y excelente relación costes/esfuerzo/tiempos, aunque puede resultar poco operativo si el cierre temporal del circuito es un aspecto muy crítico. La tercera, LE Móvil. Sin duda la ideal en este ámbito, por su rapidez, más aún si el cierre del circuito es inviable. Pero ¡¡¡Ojo!!!, siempre y cuando se realice con equipos perfectamente equipados y ajustados, porque de lo contrario la topografía resultante presentará errores, saltos y/o vacíos en la nube de puntos, rangos de incertidumbre y desajustes inadmisibles desde un punto de vista técnico topográfico. Obviamente, todos estos problemas se pueden disimular y retocar de cara al modelado, pero aquí entramos en uno de los puntos clave de este artículo: ¿es lo mismo que un tramo de pista tenga un 6% de desnivel que un 7,5%? o ¿es importante que un poste o el escalón de un muro esté 1 metro antes o después de donde está realmente? Si el simulador está enfocado a un juego, posiblemente le de igual: son los juegos que todos conocemos y que ponen más el acento en el aspecto interior del coche o en el brillo del sol en el asfalto, que en la simulación y en la competición en sí. Ojo, que esto no lo criticamos, en absoluto, simplemente destacamos que es un tipo de enfoque distinto a aquel al que quiere dirigirse este artículo. Si por el contrario, el simulador tiene otro perfil y público potencial al que quiere enfocar, entonces quizás no de igual. Debemos entender que la topografía base de un circuito se hace una vez, y normalmente ésta no cambia en esencia durante un periodo relativamente largo. Los reasfaltados o tratamientos del firme no alteran, normalmente, la topografía base, no al menos de manera sustancial. Por tanto, lo esperable es que un simulador con enfoque serio busque obtener una topografía rigurosa para dar una base sólida a sus desarrollos.
El levantamiento topográfico 3D de un circuito se puede afrontar hoy en día de tres maneras: 1, por métodos topográficos “clásicos”; 2, con LE estáticos; 3, con LE Móviles. Estos métodos se pueden en la práctica complementar, que de hecho es lo que ocurre normalmente, pero éstas serían las tres formas independientes, para entendernos, que podríamos plantear si buscamos un levantamiento topográfico correcto de un circuito. La primera fórmula, la “clásica”, es altamente precisa, pero los datos son discretos (no continuos) y operativamente es más lenta y trabajosa. El segundo método sería con LE, con precisiones y control geométrico muy buenos y excelente relación costes/esfuerzo/tiempos, aunque puede resultar poco operativo si el cierre temporal del circuito es un aspecto muy crítico. La tercera, LE Móvil. Sin duda la ideal en este ámbito, por su rapidez, más aún si el cierre del circuito es inviable. Pero ¡¡¡Ojo!!!, siempre y cuando se realice con equipos perfectamente equipados y ajustados, porque de lo contrario la topografía resultante presentará errores, saltos y/o vacíos en la nube de puntos, rangos de incertidumbre y desajustes inadmisibles desde un punto de vista técnico topográfico. Obviamente, todos estos problemas se pueden disimular y retocar de cara al modelado, pero aquí entramos en uno de los puntos clave de este artículo: ¿es lo mismo que un tramo de pista tenga un 6% de desnivel que un 7,5%? o ¿es importante que un poste o el escalón de un muro esté 1 metro antes o después de donde está realmente? Si el simulador está enfocado a un juego, posiblemente le de igual: son los juegos que todos conocemos y que ponen más el acento en el aspecto interior del coche o en el brillo del sol en el asfalto, que en la simulación y en la competición en sí. Ojo, que esto no lo criticamos, en absoluto, simplemente destacamos que es un tipo de enfoque distinto a aquel al que quiere dirigirse este artículo. Si por el contrario, el simulador tiene otro perfil y público potencial al que quiere enfocar, entonces quizás no de igual. Debemos entender que la topografía base de un circuito se hace una vez, y normalmente ésta no cambia en esencia durante un periodo relativamente largo. Los reasfaltados o tratamientos del firme no alteran, normalmente, la topografía base, no al menos de manera sustancial. Por tanto, lo esperable es que un simulador con enfoque serio busque obtener una topografía rigurosa para dar una base sólida a sus desarrollos.

Obviamente, todo esto último lo entendemos en su justa medida. Partimos de la base de que no hablamos de la construcción del Túnel de la Mancha, los simuladores no son obras civiles cuyos errores pueden poner en peligro la integridad de las personas. Sin embargo, iRacing supo detectar esta necesidad y buscar una solución técnica adecuada que le aportara ese rigor topográfico a la nube de puntos de sus circuitos. Esto, a mi juicio, deja muy claro cuál es su enfoque. Quizás también por todo esto su política se asienta en un sistema de membresías, de servicio, y de licencias, con un enfoque más a largo plazo, y no en el modelo convencional. Y aquí nos topamos con el precio de los circuitos que da título a este artículo. Mi interpretación es que iRacing no ve los circuitos como una simple “ficha del juego” inerte, sino como un servicio que se ofrece a sus clientes con la vocación de ser bueno, no sólo en la forma, sino en el fondo. Y por eso se han molestado en divulgar ese trabajo, porque quieren que se valore lo que hay detrás de esos 14,95.
Sin duda, iRacing ha realizado una apuesta muy fuerte, discreta en apariencia, pero totalmente profesional y rigurosa en el fondo, definida para posicionarse, también en este aspecto, como líder en simulación, indicando además a todos por dónde hay que ir en la creación de los circuitos y aportando a sus clientes de simracing, pero también a los pilotos profesionales que utilizan su plataforma para entrenar, una solución de ingeniería topográfica aplicada de primer orden, con vocación de servir al entrenamiento y competición tradicional y online.

Nos habría encantado hablar de los circuitos de rfactor2, pero no hemos podido conseguir información al respecto. Es sin duda, si no el mejor, uno de los mejores simuladores del momento a nivel de físicas, pero insistimos, no tenemos información sobre cómo ha levantado los circuitos que incorpora su plataforma. Puede que no haya utilizado LE pero sí otro métodos topográficos. Al no tener datos, nada más podemos añadir.
Dicho todo esto, hay que reconocer que el nivel de detalle y calidad de los circuitos que estamos disfrutando en estos momentos es espectacular. Es una época apasionante en este sentido, y la realidad virtual, alimentada con estos entornos 3D, mejora aún más la experiencia del piloto y el nivel de inmersión. Pero, precisamente por ello, también exige mejores levantamientos topográficos y mayor rigor geométrico, razón por la que esperamos aún mejores desarrollos, más calidad y rigor, y, por su puesto, también más información, para poder valorar en su justa medida cada producto.

La pregunta ahora es, ¿sigues pensando que 14,95$ es mucho dinero? Yo, sinceramente, pienso que no, máxime cuando se trata de una compra única, que sólo se hace una vez y que con ella disponemos de auténticas joyas tecnológicas.
Nota del autor: No formo parte del consulting de esos proyectos, por lo que, obviamente, desconozco lo que puede haber detrás de todos ellos. He intentado hacer una análisis constructivo, dando importancia sobre todo al tipo de enfoque que considero el correcto. Me he apoyado en mi experiencia personal como usuario del simracing, en mis conocimientos técnicos y en los datos que he podido recopilar y analizar.
Perfil de Linkedin
http://www.geocobet.com/
http://www.iracing.com/track-technology/
1) https://youtu.be/mq0MK6aXaV0
2) https://youtu.be/a7GMl4DAWuk
3) https://youtu.be/gVFVdGOmwNQ
https://youtu.be/cUI6HD_d89k?list=PLYInqRsR0uNHZKpDJOrNcIwzwzMCS9RYJ
http://www.trimble.com/Imaging/Trimble-MX2.aspx
http://leica-geosystems.com/products/mobile-sensor-platforms/capture-platforms/leica-pegasus_two
TRIMBLE http://www.trimble.com (Estáticos y Móviles)
FARO http://www.faro.com (sólo sistemas estáticos)
LEICA http://www.leica.com (Estáticos y móviles)
TOPCON http://global.topcon.com (Estáticos y Móviles)
Impresionante artículo, gracias!!